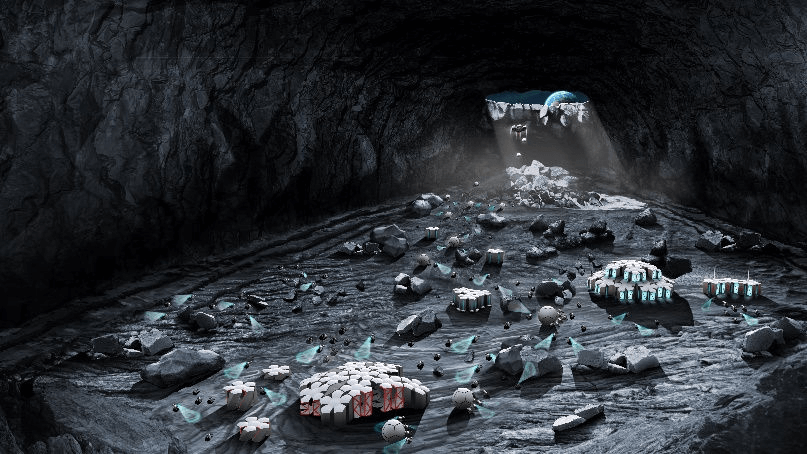
月の未知なる洞窟を小さなロボットたちが自律的に探査し、人類の新たな生活圏を作り上げる——。 まるでSF映画のような光景が、日本の研究チームによって現実になろうとしている。
本記事では、2025年3月7日に行われた内閣府ムーンショット型研究開発制度 目標3※の公開シンポジウムから、研究テーマの1つである中央大学・國井康晴教授率いる研究チームが開発する「集団共有知能をもつ進化型ロボット群」の最前線に迫り、日本の月面探査研究が切り拓く未来の可能性を探る。
※ムーンショット型研究開発制度 目標3とは
内閣府が進める、未来社会を展望し実現すれば大きなインパクトが期待される社会課題等を対象とする研究開発制度。人々を魅了する野心的な目標及び構想を国が策定する。國井教授が率いる研究チームは「2050年までに、AIとロボットの共進化により、自ら学習・行動し人と共生するロボットを実現」という目標3のもと、「未知未踏領域における拠点建築のための集団共有知能をもつ進化型ロボット群」というテーマで取り組んでいる。
目次
月面進出の鍵は月の洞窟(溶岩チューブ)!?
人類の理想的な長期滞在拠点に
月面は、私たちの想像を超える過酷な環境だ。
昼夜の温度差は200℃以上、宇宙放射線が容赦なく降り注ぎ、微小な隕石が高頻度で表面を叩き続ける。この環境で人類が長期滞在するには、強固な防護施設が不可欠となる。
この防護施設として注目されているのが「月の洞窟」と呼ばれる溶岩チューブである。
溶岩チューブとは、数十億年前に月面を流れた溶岩が固まる過程で形成された、地下の巨大な空洞のことを指す。この自然の空洞は、地下に位置するため放射線や微小隕石から自然に守られ、温度変化も穏やかだ。
この月面に成形された溶岩チューブの有用性は「月の洞窟は、月基地として最適である。」とかつてJAXAからも発表されているほどでまさに人類の長期滞在拠点として理想的な場所なのだ。
未知な場所における従来型探査の限界
—大きいことは良いことか?
しかし、この溶岩チューブを探査するには大きな課題がある。
「外部から内部環境が確認できない月の地下空間は、従来のロボットには”超”厳しい場所である」と國井教授は説明する。
月面探査ロボットは、宇宙仕様になると、高価で複雑なシステムが搭載され、大型化し低速度になりがちである。そのためこれらのロボットは、地上に比べできないことが増え、開発が困難になる。
さらに重要な問題として、1台あたり数千万円~数億円以上する従来型の大型ロボットには「1台の故障がミッション全体の失敗につながる」という本質的なリスクがある。
『自分の車を河原に落とせって言われたら抵抗ありませんか?高価なものを失うかもしれないって心理的な抵抗がどうしても発生するんですよね。最後に決定するのは人間ですから。』
國井教授は笑いながら語っていたが、宇宙開発の課題を鋭く表現しているように思う。高額な機器を未知の危険環境に導入する決断の難しさと、そこに内在する人間の心理的葛藤を捉えている。
小さな"群れ"が拓く新たな可能性
こうした限界を打破するため、國井教授のチームは発想を根本から転換した。
従来の「一台のロボットを高性能化する」アプローチから、「多数の小型ロボットを群れとして使う」アプローチへの転換だ。
これにより、不確実な環境でのリスク対応を、個々の性能ではなく数とAIの連携で実現する方法にシフトした。
一匹のアリは単純な行動しかできないが、集団になると複雑な巣を構築し、効率的に食料を集め、外敵から身を守ることを再現しているかのような方法である。
ネットワーク知能 ―集団で「進化」し未知を開拓
その方法というのが「集団共有知能をもつ進化型ロボット群」システムだ。
このシステムの中でも、とりわけ注目すべきなのが「進化型ネットワーク知能」という概念である。これは、小型でシンプルな機能しか持たないロボット複数台のネットワーク上に分散して構築される高度な知能システム。
このネットワーク知能こそが、各ロボットを自律的に連携させ、従来の大型ロボット1台では実現できなかった複雑かつ広範囲な探査を可能にする“鍵”となっている。
たとえば、ロボットの小グループAがあるエリアで取得した情報と、ロボットの小グループBが別のエリアで得たデータを通信によって共有すれば、両者は互いの「未知」を補完し合い、より的確な判断ができるようになる。
つまり、それぞれのロボットが学習した経験を集団全体で共有することで、ロボット群は“進化”し続ける。集団としての知能が高まり、時間とともにその能力は強化されていくのだ。
さらに、あるロボットが消耗し、新たな個体に世代交代する際も、人間を介在させずに困難な環境での探査や作業を可能にする。
小型跳躍ロボット「RED」—跳ねて転がる月面探査の切り札
國井教授らの研究チームは、「進化型ネットワーク知能システム」で用いる実験機として小型跳躍ロボット「RED」を開発した。
このロボットは、跳躍機構を搭載することで月面での移動を効率化しており、また、特殊な形状の車輪を採用することで不整地での走行性能も向上。跳躍と走行を組み合わせることで、従来のローバーでは乗り越えられなかった障害物もクリアできるよう設計されているという。
こうしたロボットを複数台連携させることで、広範囲かつ高効率な探査が可能になるだけでなく、仮に1台が故障しても他のロボットが役割を補完。
結果として、ミッション全体の信頼性を大幅に高めることができるのだ。
月面洞窟探査から人類の活動拠点へ
— 未知の世界への挑戦
「2035年、最初の月面溶岩チューブ居住モジュールが稼働を開始しました」 國井教授らによるプロジェクトが進むと、未来にはこんなニュースがでることが予想される。
小型ロボット群による自律的な拠点構築は、SFのような話に聞こえるかもしれない。しかし、月面拠点建設に向けた具体的な計画と技術的基盤はすでに整いつつある。
実際に、國井教授らによるプロジェクトでは、36台のロボットによる群れの形成と協調探査の地上実験に成功している。
このような動きを見せている同プロジェクトはどのように未来の月面拠点を実現していくのだろうか。
社会実装計画:社会実証に向けた3フェーズ
このプロジェクトでは、月面溶岩チューブを活用した新たな生活圏と経済圏の創出を目指し、「探査期」「開拓期」「開発期」の3段階で社会実装を進めていく。
この壮大な計画の第一歩を現実のものとするために不可欠なのが、進化型ロボット群による自律的な探査・構築技術だ。
ここからは、現在進められている「探査期」におけるミッション、そして課題と今後の展望について詳しく解説していく。
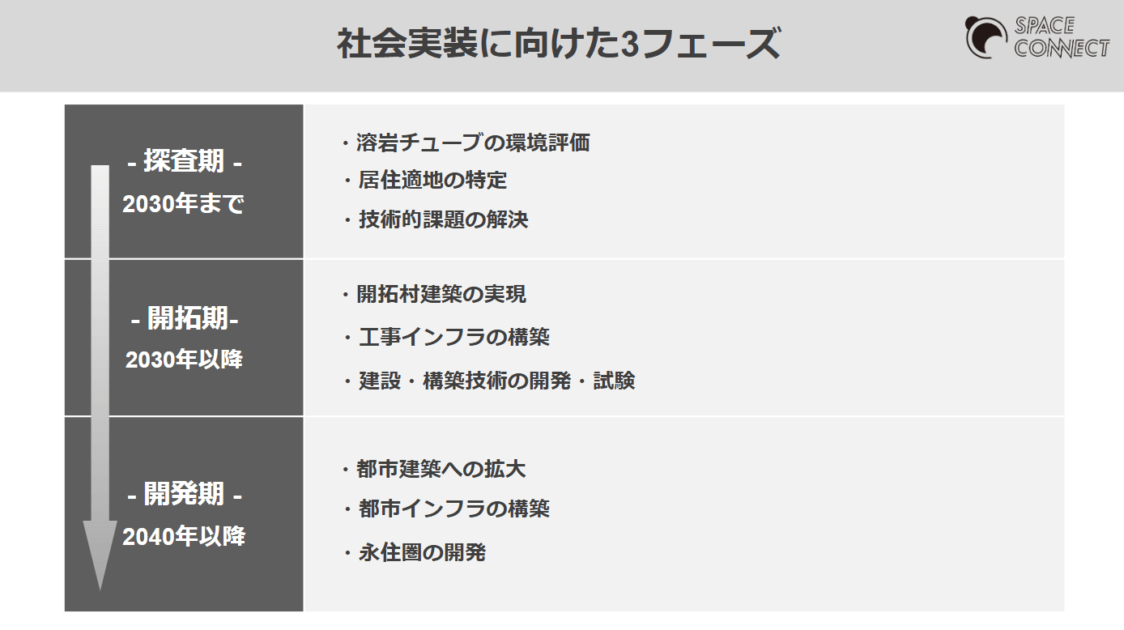
「探査期」ー2030年までの道のり
2025年から進められる「探査期」では、2030年以降の「開拓期」「開発期」に向けて、将来的な月面移住の土台を築くことが目指されている。
とりわけ重要なのが、次の3つの重要な問いに対する答えを得ることだ。
- 「住める可能性があるのか?」- 溶岩チューブの環境評価
- 「長期居住に適し、場所は確保可能か?」- 居住適地の特定
- 「居住に必要な技術は十分か?」- 技術的課題の解決
國井教授らの研究チームは、ロボット群が自律的に月面から溶岩チューブへ侵入し内部の詳細な3Dマップを作成するだけでなく、2030年の開拓期に向けて輸送用「コンテナ」と協働して資材や設備を運び込み、拠点の基礎を構築するところまでを見据えている。
そのために、通信や電力供給に制限がある状況でもロボット個体や群の行動を計画可能なネットワークAIやロボットの移動機構、ロボットの活動を支援できる輸送用コンテナなどの研究開発をさらに促進していく計画だ。
また、探査期ではミッションを進めるにあたり国内外の機関・企業との連携も重視されており、以下のような活動が進められている。
- 国際協力、国内協力の機会獲得
- NASAのアルテミス計画や各種科学探査ミッションへの技術提供
- ispace社との連携による月面着陸・探査技術の推進(2027年度以降に向けた議論)
- 2030年以降の開拓期に向けた国内外のステークホルダーとの協力体制構築
これらの連携により、実際のミッション実現性を高めるとともに、技術実証の機会を得ることを目指している。
國井教授は過去に、以下のように語っている。
『我々が目指す宇宙に生存圏が拡大した未来、その第一歩として2030年までに月に戻り、縦孔に進入して横穴の存在と居住適性を確認して2030年以降に企業などが参加する開拓期の扉に指をかける。
幸いムーンショット、スターダスト、宇宙戦略基金などで研究開発成果の創出と人材集約が始まり、各成果の融合がなされれば開拓期の到来も夢ではない。
だからこそ未来に向け、2030年までに可能性を示すことが重要である。
ISASニュース 2024年11月号より
描く将来像は、基礎建築の開発から永住圏の開発へと段階的に発展させ、2050年までに新たな生活圏と経済圏の創造を実現する壮大なビジョン。
彼らのプロジェクトにより、人類が到着する前にロボット群によって居住可能な環境が月面に整備されているという未来も夢ではないだろう。
さいごに
いかがでしたか。
このプロジェクトの成功により、人間が容易に立ち入れない月の溶岩チューブ内部の詳細な探査が可能となり、月面での人間活動拠点構築への道が開かれるだろう。
さらに、開発された技術は、災害現場や原子力施設など、地球上の危険な環境でのロボット活用などにも応用でき、地上に様々なメリットを提供する。
本シンポジウムでは、ムーンショット型研究開発制度の名にふさわしい、この野心的なプロジェクトの着実な進展を実感できた。
月面拠点構築というビジョンに向け、一歩一歩着実に歩みを進めていく本プロジェクトの展開から今後も目が離せない。
宇宙産業は今後さらなる発展が見込まれており、多様な人材が求められています。
最先端の宇宙プロジェクトに携わりたい方、挑戦したい方は、当社が運営する宇宙産業特化型の転職サイト『スペジョブ』をぜひご覧ください。未来を創る一員となるチャンスがあるかもしれません。
参考