2025年3月7日、民間初の月面軟着陸を達成したアメリカの宇宙企業 Intuitive Machinesの2回目の月面着陸ミッション「IM-2」が実施された。
このミッションでは、NASAの科学観測機器や日本の宇宙企業である株式会社ダイモンが開発した小型月面探査車「YAOKI」が月面着陸船「Nova-C(愛称:Athena)」に搭載され、月にたどり着いた。
本記事では、今回のミッション結果についてまとめている。
目次
前回の「IM-1」結果と「IM-2」のミッション概要
2024年2月に実施された、前回のIntuitive Machines月面着陸ミッション「IM-1」は、Intuitive MachinesがNASAと共同で進める3つの月面ミッションのうちの第1弾であり、NASAの商業月面ペイロードサービス(CLPS)およびアルテミス計画の一環として、NASAの科学観測機器6基を月の南極地域へ輸送することを目的としていた。
ミッションの結果、月着陸船「Nova-C(愛称:Odysseus)」は、月の南極地域に位置する「マラパート・A・クレーター」付近への着陸に成功。
着陸時には高度測定データを使用できないトラブルが発生し、Odysseusは降下の際に地表からの高度を実際よりも高く認識していたため予定よりも速い下降速度・水平速度となり、最終的に横転した状態で着陸となったものの、電力の確保やデータの送受信にも成功し、搭載した観測機器の科学データや画像を地球に送信した。この成功により、アメリカとしては50年以上ぶりの月面着陸、さらに民間企業としては世界初となる月面軟着陸を達成した。
そして、今回の同社2回目となる月面着陸ミッション「IM-2」は、2025年2月27日(日本時間)に打ち上げられた。
目指す着陸地点は月の南極から約160kmの距離に位置する「ムートン山」。月面着陸については「IM-1」の結果を顧みて、光(レーザー)を用いた高精度な距離測定技術であるLiDARの統合、機械学習やAIを活用した高度な自律着陸システムの搭載など、大幅な改良が施されていた。
また、着陸後はおよそ10日間にわたって月面移動の実証や、宇宙探査を進めるうえで重要な水資源の調査を行う予定であった。
予定されていたミッションについての詳細は、以下の記事をご覧いただきたい。
「IM-2」における月面着陸の結果
史上最南端の月面着陸!横転も一部のミッションを実施
IM-2ミッションの月面着陸は、打ち上げからわずか約1週間後の2025年3月7日に実施された。
月着陸船「Athena」は月南極域の「ムートン山」のクレーター内に着陸。着陸地点は予定された地点から250メートルほど離れていたというが、人類史上最南端の月面着陸および月面活動を達成した。
着陸後、Athenaが横倒しになっていることが確認されたが、Intuitive Machinesは搭載したプログラムやペイロードと通信を行い、データを取得することに成功。
その後、バッテリーの電力を使い果たし、太陽の角度、ソーラーパネルの向き、クレーター内の極寒環境からAthenaが再充電・再起動する可能性は低いと判断されたためミッションは終了した。
IM-2では結果的に全ての目標は達成されなかったものの、前回のIM-1から精度が向上している技術も見られている。地球との直接通信の困難さなどの課題があり、これまでの月面着陸例が少ない月南極域。そこでのIM-2ミッションの知見と成果は今後に役立っていくだろう。
月面着陸技術の成果
月面着陸ミッション後の会見では、Intuitive Machinesによる月面着陸技術の成果が述べられた。
通信システムの性能は大幅に向上し、IM-1よりもはるかに優れた通信を実現。それに伴い、地上ネットワークとの連携によって正確な軌道決定が可能となり、月に到達した際の軌道決定精度も、誤差わずか数キロメートルという高精度を達成した。
IM-1では正確な軌道決定が難しく、世界中の複数の地上局からデータを取得する必要があったが、今回のミッションでは、単独の地上局との通信のみで高精度な軌道決定が可能となったという。
また、Athenaは月面着陸開始後、降下のためにおよそ15分間もエンジンを燃焼させ、さらにその過程で高度な自律飛行技術を発揮した。
例えば、カメラで捉えたクレーターを、事前に機械学習した情報をもとにどのクレーターか自律的に特定して自身の位置を決定するという、同社が社内で新たに開発したシステムだ。
このシステムは30~40回のクレーター測定を行い、「指紋認証のような方法」でデータベースと照合。特定した月面の円形地形の中からクレーターの特徴を持つものを選別し、データベースと比較して確実に特定できるクレーターを判断するなど、期待通りに機能した。
さらに、着陸地点をスキャンし、傾斜が10度以上の場所や、ボウリングの球より大きな岩がある場所には着陸できないと判断する技術も実証され、大きな進展を遂げた。
一方で、高度測定には課題が残った。
同社のライブ配信では、月面への降下開始後しばらくは順調と見られていたが、着陸直前で月面からの高度を示すテレメトリが乱れ、Athenaが地表から数キロ下に位置していることを示す時点もあった。
同社はこの高度データの異常について、IM-1でも発生した課題と類似しており、データの詳細を解析し、原因を究明する予定と述べている。
Athenaは最終的に、横倒しとなった状態で月面に軟着陸した。
着陸後も電力確保と通信が可能であることが確認され、ペイロードのオン/オフ制御も可能な状態ではあったが、予定通りの電力発生や通信が確保できていないためミッションは予定とは異なる形で運用。
例えば、NASAの月の土俵を調査するための質量分析計は、完全に作動することはできなかったものの、着陸機の推進システムから放出されたガスに起因すると思われる要素を検出した。今回のミッションにて、NASAは合計で250MBほどのデータを収集することができたという。

YAOKI、月面で動作した日本初の月面探査車に!
ダイモンが開発した、軽量かつ耐久性に優れた小型月面探査車YAOKIは、将来的に月面基地建設や有人活動を支援するプラットフォームとしての役割を想定されている。
IM-2におけるYAOKIの初ミッションでは、月面走行および月表面の接写画像データの獲得などの月面運用が実施される予定であった。
「YAOKI」は元々、着陸の約5日後にミッションが開始される予定であったが、Athena横転に伴い着陸直後に実行される計画に変更。Athenaに搭載されている全てのペイロードの中で、YAOKIは最後にミッションを実施したという。
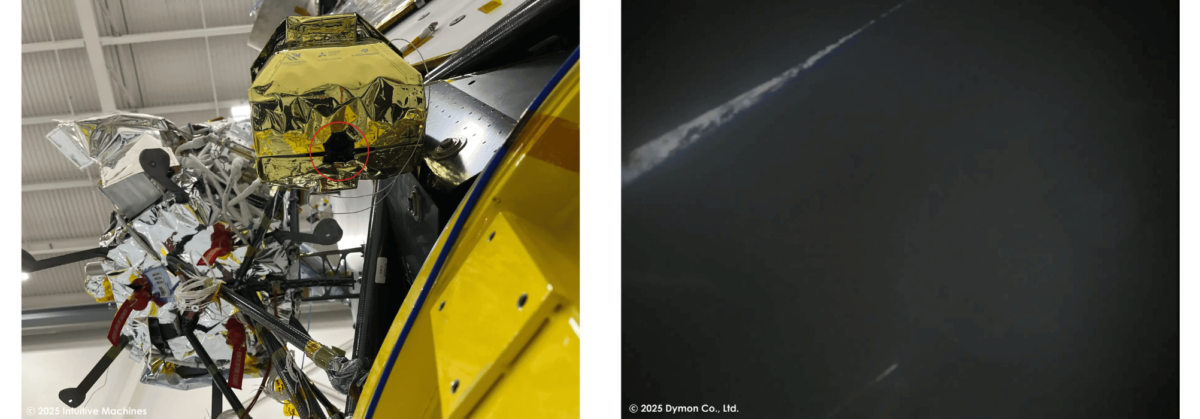
Athenaからの電力供給ができなかったため、YAOKIは月面へ展開されなかったものの、格納ケースの内部から月面写真を撮影し、送信することに成功。
地上での受信時間は1枚あたり75秒とリアルタイムに近い送信速度が確認され、また画像データの欠落もなく、クリアなデータを取得できたという。その他にも、格納ケース内部でYAOKIの車輪を回転させる実験を実施。月面に展開されていれば、走行可能であったと推定されたほか、打ち上げから探査までの全工程で、YAOKIの温度データや重心データが正常に取得された。
ダイモンは、電力供給の制限や温度の低温化など、時間が経つほど環境が悪化する状況下でも、YAOKIの全機能が正常に動作することを確認し、予定していた全機能の動作を地上からオペレーションすることに成功。
また、2時間以上にわたり貴重なデータを受信し、最終コマンド送信時点でYAOKIのバッテリー残量は4時間以上あることをオペレーションシステムにより確認したとのことだ。
そして今回得たデータは、アメリカのAstrobotic Tchnology社と契約しているProject YAOKI 2や、それ以降のミッションにも活かされていくだろう。
さいごに
いかがでしたか。
IM-2ミッションは、Intuitive Machinesにとって2度目の月面着陸挑戦であり、民間企業として史上最南端の月面着陸を達成するという大きな成果を挙げた。しかし、着陸船Athenaの横転という予期せぬ事態により、予定していたミッションの一部は実施できなかった。
それでも、自律飛行システムの成功やNASAのペイロードの運用、ダイモンのYAOKIによる月面データの取得など、技術的な進展も多く見られ、非常に注目を集めた快挙となった。
YAOKIは今回、月面走行こそ果たせなかったものの、過酷な環境下での動作確認ができたことは大きな成果であり、今後の月面探査車の開発において貴重なデータとなるだろう。
株式会社ダイモン代表取締役 中島 紳一郎 氏は以下のように述べている。
このような過酷な環境下でのYAOKIの性能は、設計の正確性、素材の耐久性と、Dymonおよびすべてのパートナーの技術力、そして確固たるチームワークの証です。
数々の課題に直面しながらも、小型民間ローバーとしての月面運用を成功させ、技術的マイルストーンを達成することができました。
Project YAOKIに関わってくれた、すべての関係者、パートナーの皆様に心から感謝します。また、YAOKIは月のクレーターの中で倒れた状態でも元気に機能し、「七転びYAOKI」を文字通り実現できたことを誇りに思います。
IM-2は、今後の月面探査ミッションに確実に繋がっていくだろう。今回の結果を踏まえ、次のIM-3ミッションやその先の挑戦にどのようにフィードバックが活かされるのか、引き続き注目したい。
参考