近年、世界各国で月探査の動きが活発化している。その中、日本でもJAXAや民間企業が月面ローバーの開発を進めている。
本記事では、日本で開発されている主な月面ローバーを一覧で整理し、それぞれの特徴を紹介する。
目次
月面ローバーとは
月面ローバーとは、観測や調査を行う探査車のことである。
車輪やホッピング機構などを用いて月面を移動し、広い範囲の地形、資源や成分、温度環境などを調査可能。カメラやセンサー、通信装置なども搭載されており、取得したデータは地球へ送信することができる。近年では、将来的な月面基地の建設や資源利用を見据え、水氷の探査や地質調査を目的としたローバー開発が各国で進められている。
日本の月面ローバーを一覧で紹介
ここでは、日本が関わる主な月面ローバーについて、開発主体やミッションの概要を一覧で整理する。

LEV-1
LEV-1は、宇宙航空研究開発機構(JAXA)が開発した超小型の月面ローバーであり、2023年に打ち上げられた月面着陸実証機「SLIM」ミッションの一部として月へ送られた。SLIMが月面に着陸した後、着陸機から分離されて月面で活動する仕組みとなっている。
LEV-1の大きな特徴は、車輪ではなくホッピング(跳躍)によって移動する点である。月の重力は地球の約6分の1と小さいため、このような移動方式が可能となっている。ローバーには通信機能が搭載されており、着陸機の状況や周辺環境のデータを地球へ送信する役割も担っていた。
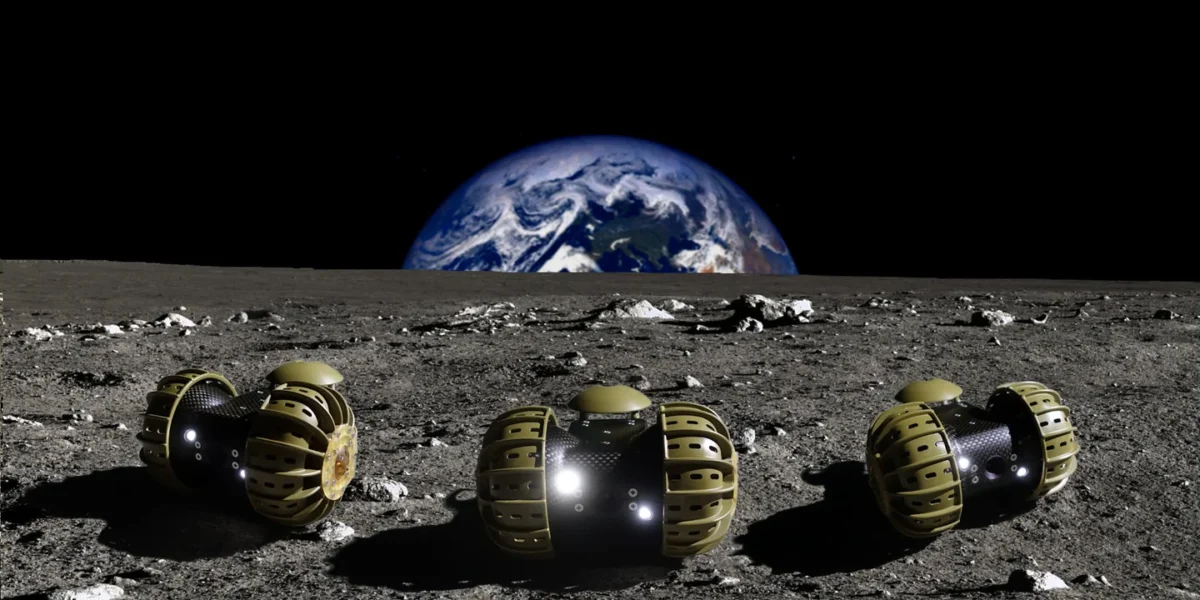
LEV-2(SORA-Q)
LEV-2は、JAXAとタカラトミー、ソニーグループ、同志社大学などが共同開発した超小型月面ローバーで、「SORA-Q」という愛称でも知られている。こちらもLEV-1と同様にSLIMミッションの一部として月面に投入されたローバーである。
直径約8cmほどの球体で月面に着地し、内部機構が変形することで走行が可能となるユニークな構造を持つ。カメラによって月面や着陸機の様子を撮影することが主なミッションであり、小型ながら高い技術力が詰め込まれたローバーとして注目を集めた。
YAOKI
YAOKIは、日本の宇宙ベンチャー企業である株式会社ダイモンが開発する月面ローバーである。小型・軽量設計を特徴としており、商業月探査ミッションへの搭載を想定して開発が進められている。
YAOKIの大きな特徴は、転倒しても自己復帰できる設計である。月面は岩石やクレーターが多く、ローバーが転倒する可能性が高いため、姿勢を立て直せる構造が重要になる。
TENACIOUS(テネシアス)

TENACIOUSは、日本の宇宙企業であるispaceの欧州子会社「ispace EUROPE」が開発している月面ローバーである。
このローバーは、月面の土壌(レゴリス)の調査やサンプル採取などを目的としており、将来的な月資源利用の基礎データを取得することが期待されている。また、商業ペイロードを搭載して月面での実証実験を行うことも想定し、民間による月面ビジネスの実現に向けた重要な技術の一つとなっている。
ispaceが進める月面輸送サービス「HAKUTO-R」ミッション2の一部として、月面での探査活動を行うことが計画されていたが、着陸機が月面に追突したため達成できていない。
ルナクルーザー
ルナクルーザーは、JAXAとトヨタ自動車が共同で開発を進めている有人月面ローバーである。NASAが主導するアルテミス計画において、宇宙飛行士が月面を長距離移動するための車両としての活用が検討されている。
このローバーは、宇宙飛行士が内部に乗り込んだまま活動できる「与圧ローバー」と呼ばれるタイプで、宇宙服を着用せずに車内で生活や作業を行うことが可能となる。航続距離は数千キロ規模とされており、将来的には月面探査の行動範囲を大きく広げる役割を担うと期待されている。
月面ローバーが今後重要な理由
将来的な月面基地の建設や資源利用を見据えると、ローバーは探査だけでなく、さまざまな用途で活用されると考えられている。主な理由として、次のような点が挙げられる。
- 月資源の探査
- 月面環境・地形の調査
- 月面インフラ構築への活用
1|月資源の探査
月面ローバーが重要視されている大きな理由の一つが、月資源の調査である。特に注目されているのが、月の極域に存在すると考えられている水氷だ。
水は飲料水として利用できるだけでなく、電気分解によって酸素や水素を取り出すことができ、将来的にはロケット燃料の製造にも活用できる可能性がある。
他にも、地球にはない貴重な資源が存在する可能性も指摘されている。代表的なものとして、将来的な核融合発電の燃料として研究されている「ヘリウム3」などが挙げられる。
2|月面環境・地形の調査
月面はクレーターや岩石が多く、地形が非常に複雑である。将来的に月面基地を建設するためには、安全に活動できる場所を選定する必要がある。
月面ローバーはカメラや各種センサーを用いて地形や土壌の状態を調査し、人類が活動しやすい場所を探すためのデータを収集する役割を持つ。
3|月面インフラ構築への活用
将来の月面活動では、人間とロボットが作業を担うことが想定されている。ローバーは探査だけではなく、資材の運搬や設備点検など、月面インフラの構築・維持にも活用される可能性がある。
特に、アルテミス計画などによって月面での長期活動が現実味を帯びる中、月面ローバーは探査から作業支援まで幅広い用途を担う技術として注目されている。
さいごに
月面探査もロケットと同様に国家主導から民間参加の時代へと移行している。日本でもJAXAだけでなく、宇宙ベンチャーや民間企業が月面ローバー開発に参入している。
今後、アルテミス計画などを背景に、日本製ローバーが月面で活動する機会はさらに増えていくと考えられる。そのため、日本の宇宙産業の重要な分野の一つとして注目されている。
宇宙業界での仕事に興味のある方は、業界特化型の人材マッチングサービス「スぺジョブ」をチェックしていただきたい。

参考
超小型月面探査ローバ LEV-1 & 2/JAXA(2026-03-11閲覧)